Invented by SCHMIDT; Valentin, DEBELEC; Marcel, AUDI AG
Modern cars are more than just machines. They are becoming smart companions, adjusting themselves to work better and safer every day. This article explores a new patent application about how cars can control and adjust their own devices, like headlights and lane assist systems, in real time. We break down the background, the science behind the idea, and what makes this invention stand out—all in simple, easy-to-understand language.
Background and Market Context
Cars today are loaded with technology. From automated headlights that follow the curve of the road to lane keeping systems that help drivers stay in their lane, these features make driving easier and safer. But behind the scenes, there’s a challenge. For these systems to work well, they need to be set up just right. This setup is called calibration. Calibration means making sure a device, like a camera or headlamp, knows exactly where it is and what it is supposed to do.
In the past, calibration was mostly done at the factory. When a new car rolled off the line, workers would set up the lights, sensors, and cameras so that everything worked as it should. But life on the road is bumpy. Over time, things shift. Headlights might point a little too high or low. Cameras just a bit off to the side. Even brand-new cars can have small differences in how things are installed. This means that what was perfect in the factory might not be perfect over time or in every car.
To solve this, car makers started using self-calibration. This means the car can check and adjust its own devices while you drive. The idea is simple: the car watches what’s happening around it and tweaks its devices to work better. For example, if a headlight is pointing too high, the car can notice this and adjust it. This keeps the car safe and lets features like adaptive headlights work their best.
But there’s a problem. Self-calibration takes time. When you drive the car after it’s first set up, it might not know exactly how to do everything perfectly. Some features, like glare-free high beams, need the lights to be lined up very carefully. If calibration isn’t finished, the car might turn off these features, making the car less helpful for the driver. Sometimes, features stay disabled for a long time, just waiting for the calibration to complete.
This creates a trade-off. Should the car wait until everything is perfect before letting you use advanced features? Or should it let you use them right away, even if they aren’t as precise? The way cars have handled this until now is to block features until calibration is finished. This keeps things safe but can be frustrating for drivers.
The patent application we’re exploring aims to change this. Its goal is to make features available sooner, but in a smart and safe way. Instead of waiting for perfect calibration, it lets the car adjust how features work based on how complete the calibration is. This means you get the benefits of advanced systems right away, and they get better the more you drive.
This approach could also save money for car makers and service centers. Cars could be released or serviced faster, since perfect calibration at the factory or during repair isn’t always needed. Instead, the car finishes the job on its own, in real time, with the driver behind the wheel.
As cars become more self-sufficient, this kind of smart control will be more important. It keeps drivers happy, makes cars safer, and helps car makers keep up with the demand for smarter, more reliable vehicles.
Scientific Rationale and Prior Art
To understand why this new approach matters, it helps to know how things have been done before. Self-calibration in cars isn’t new. For example, previous patents have described headlamp systems that re-adjust themselves after being installed. Cameras and sensors for lane keeping or adaptive cruise control can also check their own settings and make small adjustments as you drive.
One common method in the past has been “binary enablement.” This means a feature is either on or off. If a system, like a headlamp or lane assist camera, isn’t fully calibrated, the feature stays off. When calibration is finished, the feature turns on. This makes sense for safety, but it’s not ideal for drivers who want to use their car’s full abilities right away. Sometimes, calibration can take a long time, especially if the car needs to gather data while driving in different conditions. This waiting period can be frustrating.
Some patents have tried to improve this. For example, after a headlamp is replaced or adjusted, a self-calibration routine can run to make sure it’s pointing the right way. If the calibration is off, the system can use motors to correct it. For driver assistance systems, some patents have said that features should only turn on if calibration is finished and confirmed. This keeps things safe, but again, it means features might not be available for a while.
Another idea from past work is to use calibration data to decide when to enable features. If the system knows the calibration is good enough, it can turn things on. But this is still mostly a yes-or-no decision. There’s little room for middle ground. Features are either fully available or not at all.
The scientific need here is clear. Car systems are complex, and calibration is not always instant. Sensors and lights can drift out of position over time or after repairs. If cars could use these features in a limited way, even before calibration is perfect, drivers would have a better experience. The key is to do this safely—making sure that, for example, a headlamp doesn’t blind other drivers because it’s not perfectly aimed.
This is where the new patent application stands out. Instead of using a simple on/off switch for features, it introduces a way to adjust how features work, depending on how far along the calibration process is. The idea is to give features “degrees of enablement.” If calibration is just starting, the feature works in a safe, reduced mode. As calibration gets better, the feature becomes more precise and powerful.
This approach borrows ideas from control theory and adaptive systems. By monitoring the progress of calibration, the system can make smart decisions about how to set up each device. It can use “progress values” to describe how close calibration is to being finished. These values can then be mapped to different settings for each feature, like how wide a headlamp beam should be, or how close the lane assist system lets the car get to the edge of a lane before correcting.
Past patents haven’t gone this far. They have focused on turning features on or off, or on making sure calibration is correct. This patent builds on those ideas but adds a new layer of intelligence, letting cars offer more help to drivers, sooner and more smoothly.
This shift from binary control to adaptive control is the core scientific advance. It recognizes that calibration is a process, not a single moment. By tracking that process and adjusting features along the way, cars can be safer, smarter, and more user-friendly.
Invention Description and Key Innovations
The heart of this patent application is a new way for cars to control their devices while they calibrate themselves. Let’s break down how it works, what’s new about it, and why it matters.
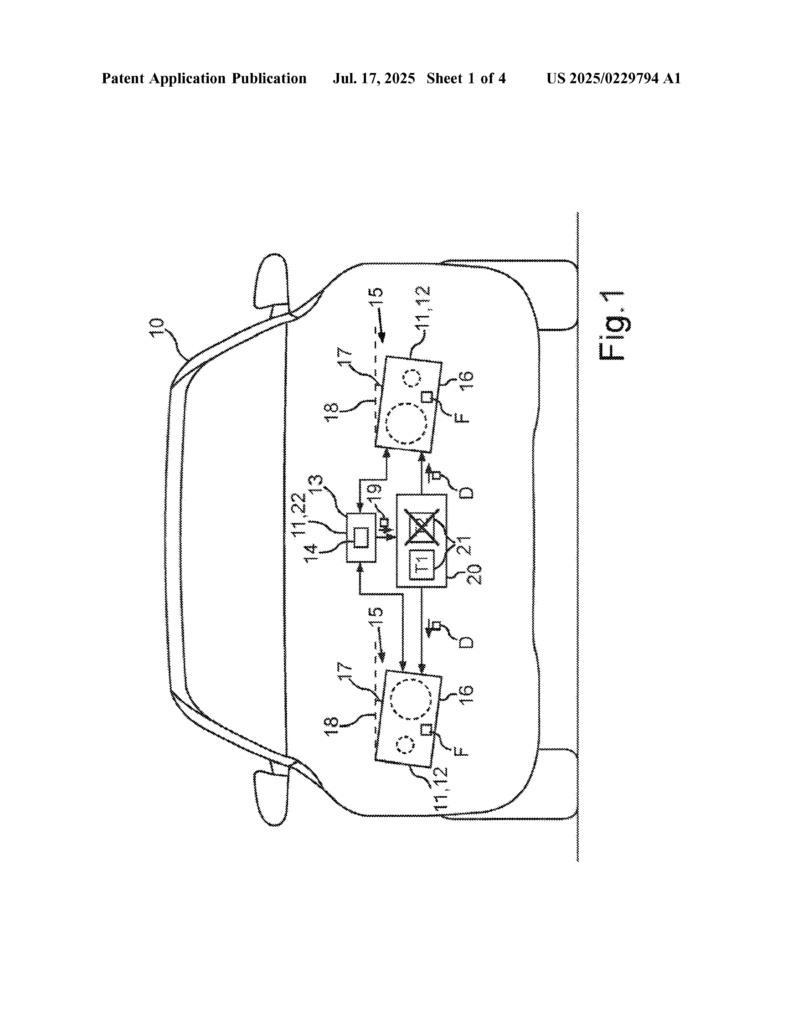
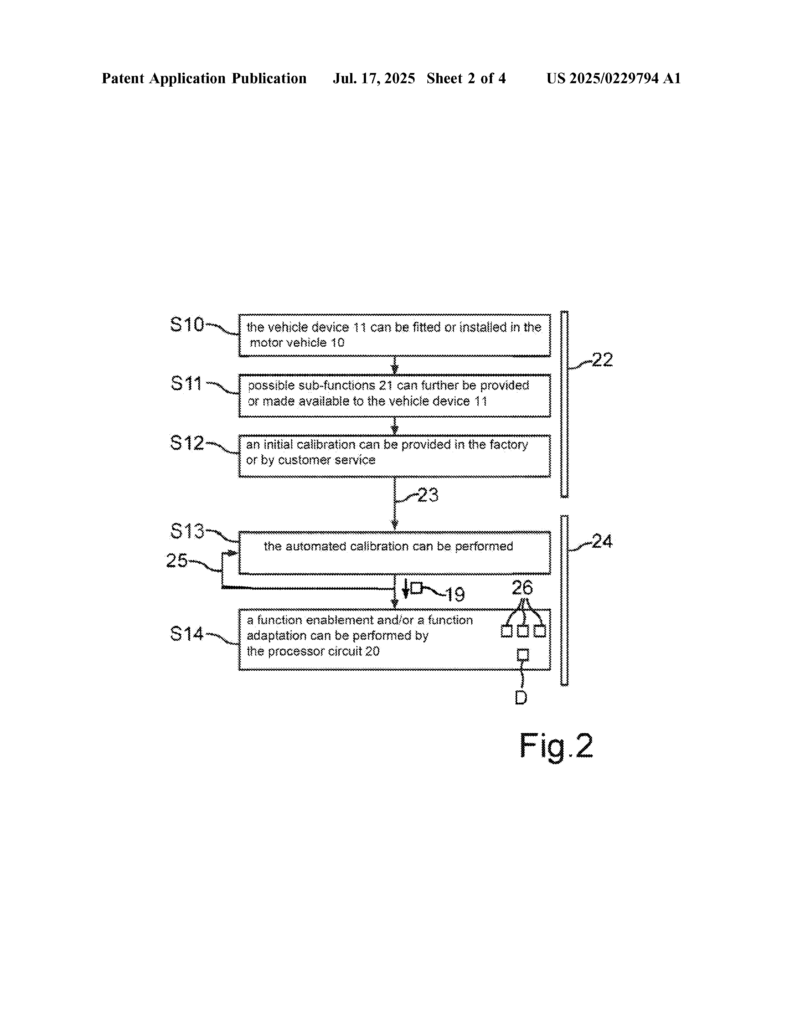
The system starts with a car device—like a headlamp system or a lane assist camera—that needs to be calibrated. When the car is first built or after a repair, the calibration might not be finished. Instead of waiting for perfect calibration, the car starts using the device right away. But here’s the clever part: it uses information from the calibration process to decide how the device should work at every step.
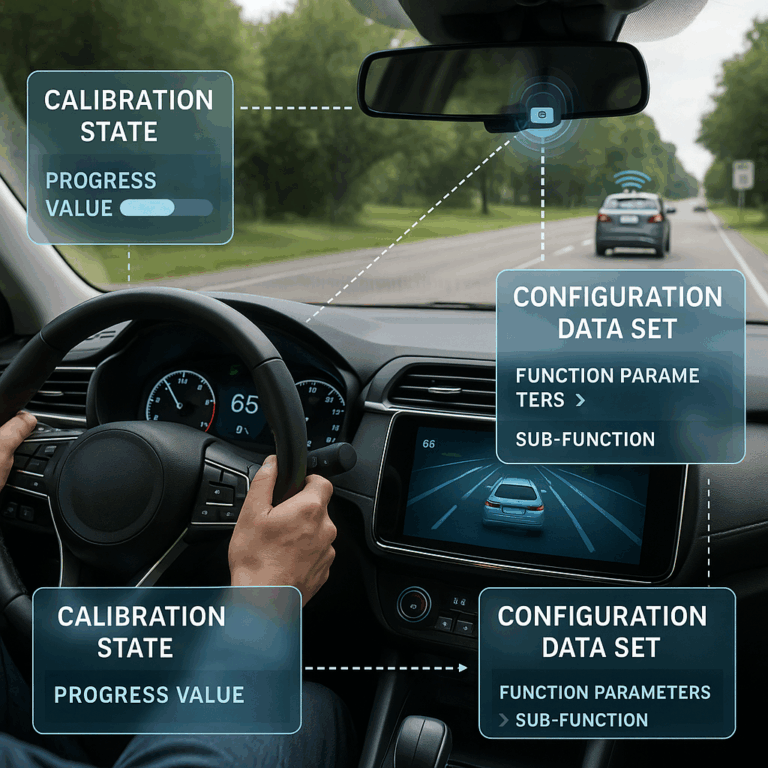
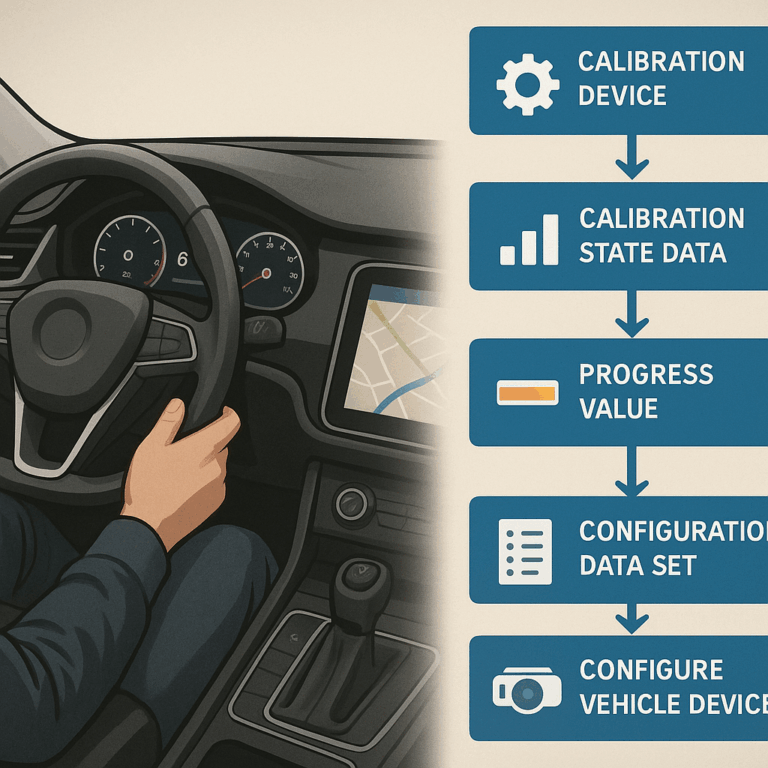
The car’s computer (called a processor circuit) keeps getting data from the calibration system. This data tells it how close the device is to being perfectly set up. The computer then calculates a “progress value.” This value shows, in simple numbers, how far along the calibration is. For example, zero percent means calibration hasn’t started, and one hundred percent means it’s complete. Anything in between shows partial progress.
Depending on this progress value, the car picks a set of settings (called a configuration data set) for the device. Each configuration data set tells the device how to act at that level of calibration. For instance, if a headlamp is only 25% calibrated, the car might set the light beam to be extra wide, making sure it doesn’t shine directly into other drivers’ eyes. As calibration improves to 50% or 75%, the beam can become narrower and more precise.
What makes this system unique is that it doesn’t just turn features on or off. Instead, it gradually improves how well the features work as calibration progresses. This means drivers get access to advanced features sooner, but always in a way that matches the current safety level of the system.
The system can also use different kinds of calibration data to make its decisions. For example, it can look at the position of the device, how much correction was needed in the last calibration step, or how quickly calibration is improving. It can even compare the car’s view of the world (like the position of other cars or road signs) with known data, to see how accurate its sensors are. If the difference is small, calibration is probably good. If the difference is big, more calibration is needed.
This idea is especially useful for complex features like:
Adaptive Headlamps: These headlamps can change their shape and brightness to avoid blinding other drivers or to highlight road signs. With this new system, the car can start using adaptive lighting right away, but keep the beam wide and safe until calibration is complete. As calibration improves, the system can narrow the beam and get closer to other cars, making night driving easier and safer.
Lane Assist Systems: Lane keeping features rely on cameras and sensors to know where the lines on the road are. If calibration is incomplete, the system might keep the car closer to the center of the lane, avoiding sharp corrections near the edge. When calibration is finished, the system allows for more precise control, making the ride smoother and more confident.
Marker Lights and Sign Glare Control: These features help highlight objects at the roadside or keep road signs from being too bright. The system can adjust the minimum size of objects it highlights, or change the light pattern, depending on how well the calibration is going.
Another important feature is feedback. The car can show drivers how calibration is going, using displays or alerts. This keeps drivers informed, so they know which features are fully available and which are still being fine-tuned.
This invention also lets car makers install devices in a “rough” or partially calibrated state, saving time and money during production or repairs. The car finishes the job itself, learning and adjusting while you drive.
Let’s look at a simple example. Imagine you just got your car back from the shop after a headlight repair. The headlamp’s computer isn’t fully calibrated, but the car knows this. As you drive, the headlamp works, but keeps the beam a bit wider, just in case. After a few trips, the calibration gets better. The beam becomes more focused, giving you better visibility without blinding others. All of this happens automatically, without you having to do anything.
This approach is not just limited to lights and lane assist. It can be used for any car device that needs calibration. The key innovation is using progress values and configuration data sets to provide a smooth, safe transition from rough calibration to perfect performance.
By breaking free from the old on/off way of controlling features, this system makes cars more adaptable, safer, and user-friendly. It helps drivers get the most out of their car’s technology without long waits, and it helps automakers build and service cars more efficiently.
Conclusion
In summary, this new patent application introduces a smarter way for cars to adjust how their devices work during self-calibration. Instead of waiting for perfect settings before turning on advanced features, the car can now use them in a safe, limited way and improve their performance as calibration gets better. This keeps drivers happy, makes cars safer, and helps car makers save time and money. As cars get more advanced, systems like this will become a key part of making sure every feature works its best, right from the start. With smart control and adaptive features, the road ahead looks brighter for everyone.
Click here https://ppubs.uspto.gov/pubwebapp/ and search 20250229794.